Nächste Seite: ...und das LCD Aufwärts: Übungen Vorherige Seite: 2024-11-24
ich glaube ich verstehe jetzt etwas mehr
NAK/ACK, NUL, DC1..DC4... VT, HT, SOH, STX, ETX ETB EOT ... |
Warum eigentlich? Wahrscheinlich, weil das was ich verwendet habe, hatte drei Leitungen
RxD |
TxD |
GND |
Was ist denn Software Handshanking. Wir haben -
RxD, TxD |
GND |
ACK/NAK |
X-ON/X-OFF |
SI/SO |
Strg-S, Strg-Q |
Wie gesagt, so weit ich sehe ist Protokollebene, nur für die oberen Schichten. Und ich lerne das noch 100 prozent auch mit RS232
Verstehen tue ich es trotzdem nicht - weil der Witz ist ja - die 8 Bit Zeichen kommen ja trotzdem an. Und so wie Linux gemacht ist geht das mit
echo "abc" > /dev/ttyS3 cat /dev/ttyS3 |
ACK/NAK |
Nur, ich glaube das Software Handshaking auf Hardware Ebene ist dazu da - das ende eines Datenpaketes zum beispiel für die nächste ebene ein zu leiten, oder - sagen wir - das Ende der Übertragung
Ich kann mir trotzdem vorstellen, durch das
CTS/RTS |
es stimmt nicht, was ich sagte, dass das
CTS/RTS |
Die Gute Nachricht, das funktioniert. Ich habe das gemacht, um die anderen Leitungen zu unterbrechen
Das mit dem Systemtakt ist mir bis jetzt unheimlich, aber ich kann es erklären, ich habe was dazu gelernt.
Ich bin was das betrifft nicht 100 pro das gebe ich zu, da lege ich auch keinen Wert drauf, muss ich ehrlich sagen. Das kommt noch. Wenn man es braucht
Also, das erste ist - ich habe die ganze Zeit vermutet, es liegt an der Baudrate - weil - ich habe alles und jedes bisschen gemacht und den einzigen Fortschritt den ich erzielen konnte, war indem ich RAW einstellte - bei stty
Und - ich habe die Parität richtig auf ODD gestellt, wie ich im Controller Aktiviert - ebenso hatte ich zwei Stop Bit. Und ich habe das zusätzlich angeschaltet, ging nicht
Dann habe ich - das zurücknommen, das ist Std nicht drin. Nichts ging. Aber zeichen kam. und bei RAW ging was
Dann habe ich - aber manchmal mit der Baudrate gespielt, und komischerweise hat sich was verändert an den Zeichen
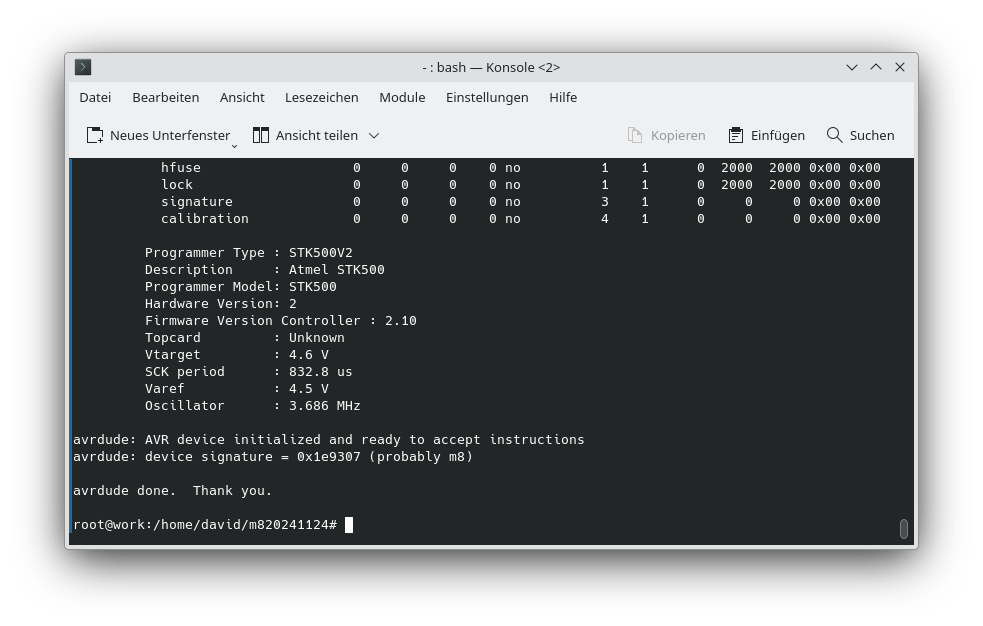
Jetzt kam mir die Idee das STK500 und den Atmega8 aus zu lesen, auf welchem CPU Takt der läuft.
und da muss ich sagen, verstehe ich avrdude und STK500 nicht zu 100 prozent
Das eine war. Ich dachte, hat etwa, da der verdoppelte Takt eine Rolle gespielt, das geht ja
Und ich habe dann im Netz gelesen, der Takt ist beim Atmega8, wenn man den kauft und ich habe die ja nicht mit STK500 gekauft, das sind alles neue - ist immer auf 1MHz eingestellt
Das hat mich gewundert. Es gibt diesen magischen Wert
4000000 = 4MHz |
3.6864 MHz |
1MHz |
Dann steht da ja
Oscillator : 3.686 MHz |
Programmer Type : STK500V2
Description : Atmel STK500
Programmer Model: STK500
Hardware Version: 2
Firmware Version Controller : 2.10
Topcard : Unknown
Vtarget : 4.6 V
SCK period : 832.8 us
Varef : 4.5 V
Oscillator : 3.686 MHz
|
dann dachte ich probiere ich es mit 1MHz
Und, dann habe ich noch ein bisschen mehr geguckt, da gibt es so eine rechnung, bei mikrocontroller.net und die Baudrate, nicht die Baudrate - aber was in UBRR steht oder doch die Baudrate - muss 1 prozent. Und weil nichts ging habe ich mal das verwendet
Keine Sorge, an dem Code von mir ist kein Fehler, der wäre heimlich drin. Ich nehme gleich meinen Code, wie ich ihn bisher nahm und nehme entsprechendes, sie werden sehen mein Code geht genauso mit den richtigen Werten, für letzten UBRRH und UBRRL, der Teiler muss anders sein, wenn CPU Takt und Baudrate sich unterscheiden
Aber die haben das so gebaut, dass bei einem falschen Wert, von Verhältnis CPU Takt und UBBR gibt es eine Meldung. Das ist nicht die welt. Das ist ein Makro. Ich habe es verwendet, auf die Schnelle
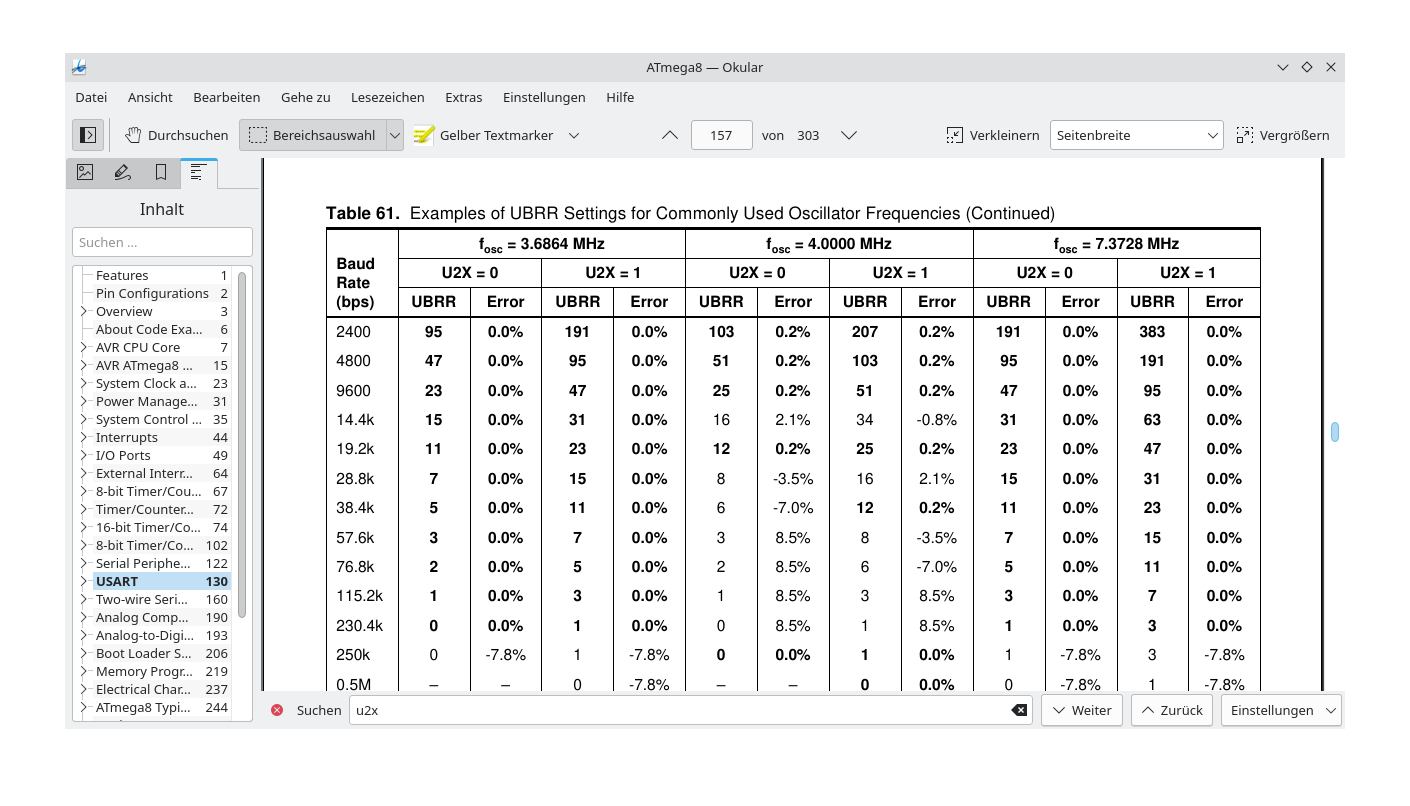
Das geht auch so - weil sie haben ja - das Datenblatt. Da steht auch die Formel drin, wie sie mikrocontroller.net anbietet, aber das ist nicht nötig, weil - es gibt in dem Datenblatt für Atmega8 Tabellen für die MHz des Prozessors bezüglich der Baudrate
Der Witz ist - der Prozessor läuft mit 1MHz und die Baudrate mit 9600 geht dann nicht, sondern max. 2400. Und dann geht es.
Hier stehen die Tabellen, jetzt mein eigenes Programm. Ich nehme den Wert aus der Tabelle, für meines Und dann mache ich änderung 2 Stopbits - und - Parität ein Mal Odd und ein Mal even und dann mache ich noch - empfangen - dass die LED blinken.
Es tut auch mit dem eigenen.
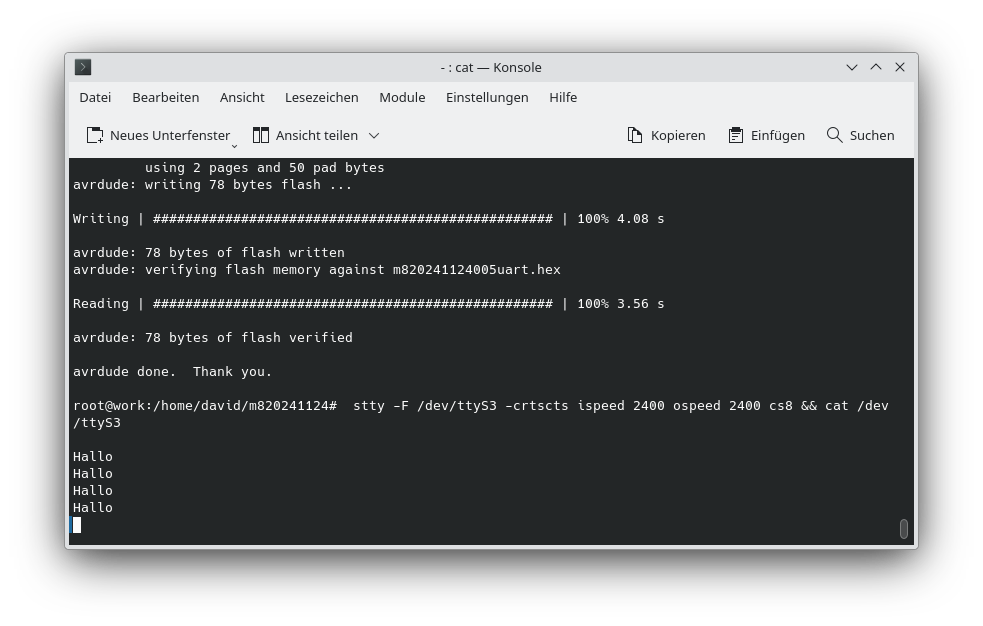
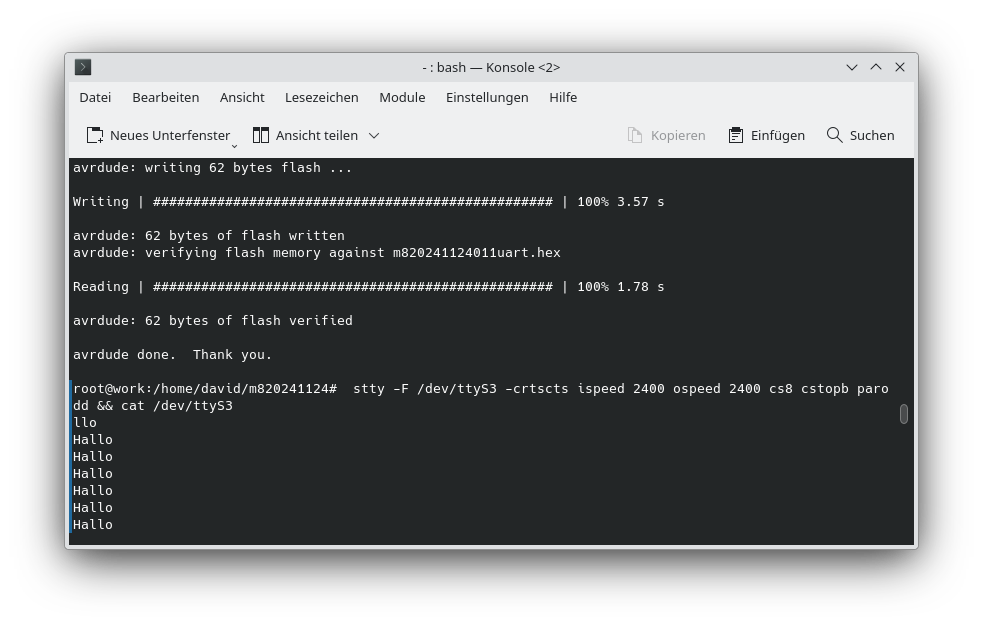
Mit dem Wert 25 in UBRR und 2400 Baud. Ich muss eine Besserung machen, das Ding scheint sich bisher nicht gut zu widerholen. Mit jedem neuem RESET kommt eine Meldung. Ich weiss auch, wo der Fehler war. Jetzt läuft da wild Hallo herunter. Jetzt hatten die ausgerechnet die Routine sync eingebaut, die ich zunächst verwendet hatte, so sinnvoll ist die nicht. Die hat nicht so viel damit zu tun. Das ist einfach eine Warteschleife, die verzögert und die haben das unter dem Hintergrund gemacht, wenn das Kabel getrennt wird und verbunden, dann wird ohne Pause weiter gesendet und dadurch dass das so weiter läuft, wird beim Wideranschliessen, so zu sagen - der Empfang, der PC - der Terminal nicht zur Ruhe kommen Wenn ich weglasse, geht es jetzt Jetzt teste ich parität - odd und zwei Stop bit
es geht mit zwei Stop bit und odd parität und ich habe festgestellt, das hat zunächst keine Auswirkung auf die Funktion, es wird genauso gesendet.
;; das rauf z"ahlen tut auch vom Sender: Voller erfolg, hier der Code .include "m8def.inc" ldi r16, HIGH (RAMEND) out SPH, r16 ldi r16, LOW (RAMEND) out SPL, r16 ldi r16, 0xff out DDRB, r16 .equ BAUDRATE = 25 ldi r16, HIGH (BAUDRATE) out UBRRH, r16 ldi r16, LOW (BAUDRATE) out UBRRL, r16 ;ldi r16, (0 << UCSZ2) ;out UCSRB, r16 ldi r16, (1 << URSEL) | (1 << UCSZ1) | (1 << UCSZ0) ;ldi r16, (1 << URSEL) | (1 << UCSZ1) | (1 << UCSZ0) out UCSRC, r16 ;;ldi r16, (1 << TXEN) ;;out UCSRB, r16 ;sbi UCSRB, TXEN ; Enable Receiver and Transmitter ldi r16, (1<<RXEN) out UCSRB,r16 recieve_loop: sbis UCSRA, RXC rjmp recieve_loop in r16, UDR com r16 out PORTB, r16 rjmp recieve_loop |
mit dem C Code habe ich die Zählroutine der Bash zu zeichen verwandelt - die ich mit echo senden kann
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
int main (int argc, char *argv []) {
printf ("%c", atoi(argv[1]));
return 0;
}
|
hier das Bash Skript Das video folgt
#!/bin/bash
i=0
while [ true ]
do
while [ $i -lt 255 ]
do
i=$(($i+1))
./atoi $i > /dev/ttyS3
./atoi $i
sleep 1
done
done
|
Und die Codes folgen natürlich auch
.include "m8def.inc" ldi r16, HIGH (RAMEND) out SPH, r16 ldi r16, LOW (RAMEND) out SPL, r16 ;ldi r16, 0b00000010 ;out DDRD, r16 .equ BAUDRATE = 25 ldi r16, HIGH (BAUDRATE) out UBRRH, r16 ldi r16, LOW (BAUDRATE) out UBRRL, r16 ;ldi r16, (0 << UCSZ2) ;out UCSRB, r16 ;ldi r16, (1 << URSEL) | (1 << UCSZ1) | (1 << UCSZ0) | (1 << USBS) | (1 << UPM0) | (1 << UPM1) ldi r16, (1 << URSEL) | (1 << UCSZ1) | (1 << UCSZ0) out UCSRC, r16 ;;ldi r16, (1 << TXEN) ;;out UCSRB, r16 ;sbi UCSRB, TXEN ; Enable Receiver and Transmitter ldi r16, (1<<TXEN) out UCSRB,r16 again: ldi r16, 'H' rcall rs232out ldi r16, 'a' rcall rs232out ldi r16, 'l' rcall rs232out ldi r16, 'l' rcall rs232out ldi r16, 'o' rcall rs232out ldi r16, 10 rcall rs232out ldi r16, 13 rcall rs232out rjmp again rs232out: sbis UCSRA, UDRE rjmp rs232out out UDR, r16 ret |
Und hier
.include "m8def.inc" ldi r16, HIGH (RAMEND) out SPH, r16 ldi r16, LOW (RAMEND) out SPL, r16 ;ldi r16, 0b00000010 ;out DDRD, r16 .equ BAUDRATE = 25 ldi r16, HIGH (BAUDRATE) out UBRRH, r16 ldi r16, LOW (BAUDRATE) out UBRRL, r16 ;ldi r16, (0 << UCSZ2) ;out UCSRB, r16 ldi r16, (1 << URSEL) | (1 << UCSZ1) | (1 << UCSZ0) | (1 << USBS) | (1 << UPM0) | (1 << UPM1) ;ldi r16, (1 << URSEL) | (1 << UCSZ1) | (1 << UCSZ0) out UCSRC, r16 ;;ldi r16, (1 << TXEN) ;;out UCSRB, r16 ;sbi UCSRB, TXEN ; Enable Receiver and Transmitter ldi r16, (1<<TXEN) out UCSRB,r16 again: ldi r16, 'H' rcall rs232out ldi r16, 'a' rcall rs232out ldi r16, 'l' rcall rs232out ldi r16, 'l' rcall rs232out ldi r16, 'o' rcall rs232out ldi r16, 10 rcall rs232out ldi r16, 13 rcall rs232out rjmp again rs232out: sbis UCSRA, UDRE rjmp rs232out out UDR, r16 ret |
das kommt zu den Std. Übungen, Externe Interrupts und RS-232. Und jetzt kommt noch - alles auf die Homepage - aber - LCD HD44780 und - was ich gucke, hat der Atmega8 einen DA Wandler.
https://www.mikrocontroller.net/articles/AVR-GCC-Tutorial/Analoge_Ein-_und_Ausgabe
Ja, wenn ich mit dem Timer auch fertig bin, werde ich mal probieren, folgendes zu tun. Ich werde mich nachdem auch i2c habe, mich dem Thema AD-Wandler und DA-Wandler zu wenden. Und - und ich werde - einfach mal FFT aussen vor lassen. Einen Sound Abtasten und ich werde versuchen ihn unweigerlich wieder mit der entsprechenden Frequenz auf einen Lautsprecher zu schicken. Mal sehen, was man hört. Das kommt später.